Don't Miss
UniFP|新技術讓機械人學靈巧施力
By 信報財經新聞 on October 22, 2025
原文刊於信報財經新聞「CEO AI⎹ EJ Tech」
北京通用人工智能研究院(BIGAI)與北京郵電大學的聯合研究團隊,提出全球首套用於足式機械人的「統一力位混合控制策略」(UniFP)。
有關論文上月在南韓首爾舉辦的第九屆國際機器人學習會議(CoRL)提交宣讀,並且獲遴選委員會評為兩篇最佳論文之一。央視報道,這是該獎項首次由全華裔學者獲得。
按環境調整 毋須力傳感器
論文其中一位作者、BIGAI具身機械人中心主任黃思遠表示,「我們現在主要是靠接觸點來做力位混合控制,未來我們希望把單個的接觸點去擴展到全身……來更好地和人類做一個親密接觸。」
目前機械人主要依賴視覺—語言—動作模型(VLA)來完成任務,但在真實場景經常遇到樽頸,特別是涉及控制接觸力度的任務,例如擦黑板、開關櫃門等。
UniFP設計靈感來自阻抗控制,類似彈簧、阻尼(Damping)組合,不只按照座標去動,而是視乎環境自動調整力度。這讓機械人毋須配備力傳感器,就能學習位置與力度的控制,實現複雜的接觸與操作行為。
身為論文第一作者的BIGAI研究員智佩淵說:「(機械人)可以有一定安全性,例如人碰到它,它不會有很大的力去破壞人的身體,或者說破壞物體。」
安全觸碰 可照顧老人病患
透過此一技術,實現人機協同可望更為流暢,並有機會拓展至按摩、照料老人或病者等要求親密接觸的應用場景。
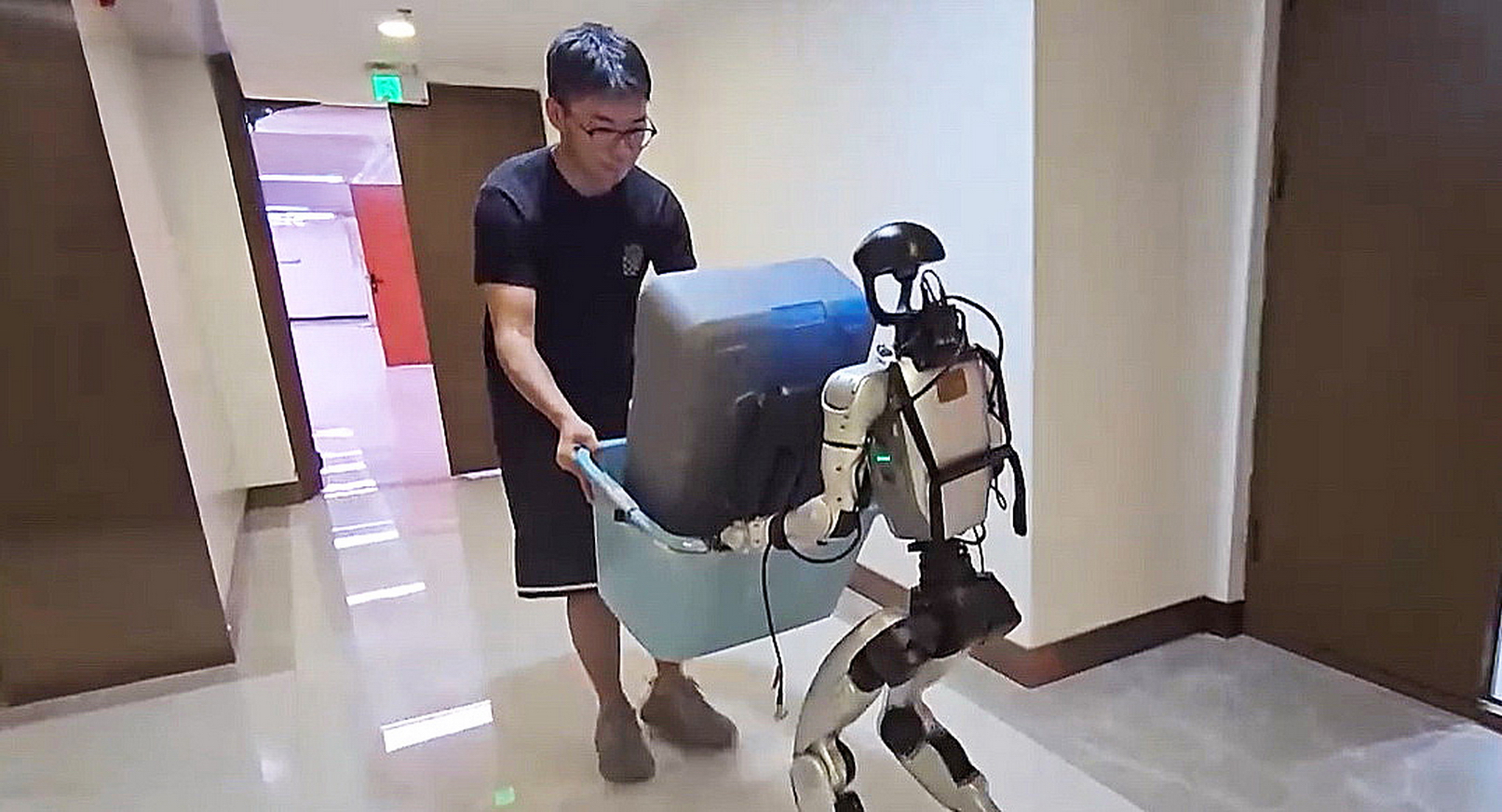
研究人員利用宇樹B2-Z1四足與G1人形機械人測試7項任務,而UniFP在其中4項實作任務的成功率,比起單純使用位置控制策略,平均提升約39.5%。另外,團隊又提出「力覺感知模仿學習」(FAIL)資料與訓練收集流程,透過估算外力資訊形成「帶力標籤」,使機械人穩定學習如何「用力」。
支持EJ Tech

 如欲投稿、報料,發布新聞稿或採訪通知,按這裏聯絡我們。
如欲投稿、報料,發布新聞稿或採訪通知,按這裏聯絡我們。

















{kind=link}
{kind=link}